供应测距传感器ZLDS100测量机械手臂的位移
| 价 格: | 面议 | |
| 型号/规格: | ZLDS100 | |
| 品牌/商标: | ZSY |
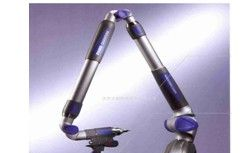
在机械手臂应用中,比如在对底座、大臂、小臂或者多轴的系统控制中,需要实时检测它们的位置信息,并将其位置传送到控制中心进行处理;机械手臂的位置检测器,要求小尺寸,以便能更好的安装。
机械手臂的位置检测器,包括X、Y、Z三个维度,每一维的机械手臂位置信息的反馈,都有单独的数据,真尚有根据三个维度的数据,利用ZLDS100测距传感器重新构建了一个即时信息系统,将三个维度的信息合并为一个三维数据,即时反馈机械手臂的动态位移。由测距传感器ZLDS100构建的三维系统,在显微外科手术机器人、半导体自动化等高精度机械手臂的应用中,可提供每秒9400多个位置信息,为机械手臂的控制提供必要的反馈信息。它不仅反应非常灵敏,而且可以通过读取的位置信息,计算得到机械手臂的运动速度等参数。
型号:ZLDS100
量程:0-2000mm
精度:0.1%
采样频率:2K、5K、8K、9.4K
ZLDS100 测距传感器产品除标准系列外,还可根据用户的特殊需要定制。如果您不了解产品性能是否能满足您的需要,您可申请样品试用,我们帮您解决试验过程中的问题,直到您满意为止。
激光传感器可订制各种尺寸,能够适应恶劣环境。同时提供了在计算机上运行附带的传感器软件。该软件提供简单的数据读取、显示以及传感器参数设置功能,方便路面或隧道的链条位移等测量。ZLDS100系列激光传感器提供了一个传感器开发库(目前仅支持Windows),以DLL形式提供,封装底层串口通讯协议细节,提供简单易用的编程接口,便于开发人员快速进行应用软件的开发。
ZLDS100 激光传感器的主要特点有:
n ZLDS100R-4-39传感器可用于镜面和玻璃的表面测量;
n 量程起始距离最小10mm,260mm(其他距离可订制);
n 分辨率0.01%,线性度0.1%;
n 支持多个传感器同步采集(确保工业在线高精度差动测厚);
n 支持特殊量程(如远距离起始700mm小量程300mm等);
n 针对串口,提供了运行应用的DLL开发库,方便用户开发应用软件;
n 非接触位移精密测量;
n 特殊应用(如路面平整度,高温被测体,管道内径,
n 石油钻杆内外螺纹测量等均可定制);
n 量程最小2mm,1250mm(其他量程可订制);
n 频率响应:2K、5K、8K、9.4K;
- 所属城市:广东 深圳
- [联系时请说明来自维库仪器仪表网]
- 联系人: 江山
- 电话:0755-26528100/26528011/26528012
- 传真:0755-26528210
- 手机:13312971170
- QQ :

供应测厚传感器激光传感器测量钢板厚度和重叠焊缝高度
信息内容:应用:金属行业 传感器:ZLDS10X系列 金属制造业厂自动化,用激光测量传感器以高分辨率测量钢板厚度的理想之选。钢板从两个上下相对称的非接触激光传感器中走过,成对传感器配置能确保钢板在移动过程的上下振动将被抑制。一台计算机或PLC获得传感器输出就可以依据简单的数学计算出钢板的厚度。同时可以检测到两个钢带焊接处重叠的位置。传感器能精确测量各种颜色,包括黑色的钢。 测厚传感器是根据超声波脉冲反射原理来进行厚度测量,当探头发射超声波脉冲通过被测物体到达材料分界面时,脉冲被反射回探头, 测厚传感器通过精确测量超声波在材料中传播的时间来确定被测材料的厚度。凡能使超声波以一恒定速度在其内部传播的各种材料均可采用此原理测量。测厚传感器是一种能感受被测物体厚度并转换成可用输出信号(如模拟的电流电压信号或者数字信号)的传感器。它在工业生产过程中常用于测量材料及其表面镀层厚度,并且可以用于厚度控制系统的误差测量。测厚传感器的主要特点是在测量过程中,不需要测量出材料厚度的尺寸,而只需知道测量厚度的相对值或者相对于一个标准值的厚度。 测厚传感器应用领域 木板、塑料板、金属板...

供应测径仪 测内径测 内径传感器 测径 内径测量
信息内容:ZLDS10X内径测量传感器专用于检测管道内径,它由三台ZLDS10X激光位移传感器组成,在检测管道内径及其它管状物体的内径提供了非常方便的测量方式。 传感器测量的数据是以 距离的形式显示,即一个测量面传感器反馈3个距离值,再通过用户自己开发的算法和厂家给的角度值,可算出当前测量面的直径。 显示的是距离值也方面用户安装校准。 测内径工作原理 主要应用于测量管道的内径,测量炮筒的内径、天然气管的内径、空心桥墩的内径等等 工作原理 基本原理是光学三角法: 半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。 dzsc/19/4210/19421056.jpg



")
 规格齐全")


