有限公司")










- 企业类型:贸易商
- 新旧程度:全新
- 原产地:德国
供应西门子6SE6420-2UC22-2BA1变频器

6SE6420-2UC22-2BA1MICROMASTER 420MICROMASTER 420 UNFILTERED 1/3AC 200-240V +10/-10% 47-63HZ CONSTANT TORQUE POWER 2.2 KW OVERLOAD 150% FOR 60S VARIABLE TORQUE POWER 2.2 KW 202 X 149 X 172 (H X W X D) PROTECTION IP20 AMBIENT TEMP -10 TO +50 DEG C W/O AOP/BOP
希殿电气技术(上海)有限公司
联 系 人 ;康经理(销售工程师)
联 系 :微信
座机 :
传 真 :
邮 箱 :@qq.com
MICROMASTER 4 (MM4)/ SINAMICS G120 (CU2x0x): 速度和控制特性
文献
涉及产品
“速度”是在负载保持恒定的情况下,变频器跟随设定速度的能力。
MM440和G120能提供怎样的速度和控制特性?
针对此问题,需从以下几种情况进行考虑:
1. V/f 控制
采用不带滑差补偿的V/f 控制,变频器工作在开环控制模式下。
速度的实际值(转子速度)受负载的影响会波动很大。
在额定负载下,感应电机转子速度相比于变频器输出速度会降低额定滑差速度-对于750w的电机,降低接近7%(=1395rpm,四极电机50hz的同步转速为1500rpm)。
2. 带滑差补偿的V/f 控制
在这种情况下,变频器同样处于开环控制模式下;但滑差补偿可消除由于负载引起的速降。补偿的依赖于电机模型和温度补偿设置的程度。在对传动进行正确的调试后,实际速度可控制在与同步速度相差几个百分点之内。如果操作条件保持不变,滑差补偿可以设置得更,从而更好地补偿由于负载引起的速降。
3. SLVC, 无速度编码器的闭环矢量控制
在这种控制方式下,当输出频率超过电流模型的切换点频率(> 3Hz)时,变频器立即进入闭环控制模式。变频器采用由软件模型计算出的转子速度作为反馈的实际速度。
在此种控制方式下,切换点以上,速度会根据负载大小基本保持不变。当负载突变时,会存在瞬时速度偏差。速度由电机模型的和定、转子电阻温度适应性决定。在切换点以上,速度接近额定滑差频率的10%-20%。例如,对于750w感应电机,速度达到0.7%-1.4%。
在非常低的频率下-低于切换点(<5Hz),系统切换到采用电流模型的开环控制方式 ,速度与带滑差补偿的V/f 控制一致。
4. VC , 有速度编码器的闭环矢量控制
此种控制方式下,借助编码器反馈的实际值,变频器可以在整个频率段都工作在闭环控制模式下。速度由所选编码器的和质量决定。尽管如此,当负载发生变化的时候,瞬间速度偏差还是存在的。
5. MM440 和 G120 与控制相关的特性
在附件的文档内提供了模拟量与数字量输入输出的正常值。这些值(经过计算的)可以认为是小值和/或平均值 - 工程设计中可参考此值。
1. 串行通讯模块基本信息介绍
CP340/CP341/CP440/CP441-1/CP441-2模块是西门子S7-300/400系列PLC中的串行通讯模块,这些模块具有1个或2个(CP441-2)串行通讯接口(RS232C、20mA-TTY或RS485/422)。您可以使用这些通讯模块实现S7-300/400系统与其他串行通讯设备的数据交换,例如打印机、扫描仪、智能仪表、第三方MODBUS主从站、Data Highway、变频器,USS站等。
1.1 产品订货信息
下表给出了常用串行通讯模块以及相关产品的订货信息:
| 产品名称 | 订货号 | 备注 |
| 通信模块 | ||
| S7-200 CPU | 参考S7-200样本或手册 | S7-200 |
| CM 1241-RS232 | 6ES7 241-1AH30-0XB0 | S7-1200 |
| CM 1241-RS485 | 6ES7 241-1CH30-0XB0 | |
| CPU313C-2PtP | 6ES7 313-6BF03-0AB0 | S7-300 CPU |
| CPU314C-2PtP | 6ES7 314-6BG03-0AB0 | |
| CP340-RS232C | 6ES7 340-1AH02-0AE0 | S7-300 CP |
| CP340-20mA-TTY | 6ES7 340-1BH02-0AE0 | |
| CP340-RS422/485 | 6ES7 340-1CH02-0AE0 | |
| CP341-RS232C | 6ES7 341-1AH02-0AE0 | |
| CP341-20mA-TTY | 6ES7 341-1BH02-0AE0 | |
| CP341-RS422/485 | 6ES7 341-1CH02-0AE0 | |
| CP440 | 6ES7 440-1CS00-0YE0 | S7-400 |
| CP441-1 | 6ES7 441-1AA04-0AE0 | |
| CP441-2 | 6ES7 441-2AA04-0AE0 | |
| CP441-2 RS232C接口子模块 | 6ES7 963-1AA00-0AA0 | |
| CP441-2 20mA TTY接口子模块 | 6ES7 963-2AA00-0AA0 | |
| CP441-2 RS422/485接口子模块 | 6ES7 963-3AA00-0AA0 | |
| ET200S ISI 3964/ASCII | 6ES7 138-4DF01-0AB0 | ET200S |
| ET200S ISI MODBUS/USS | 6ES7 138-4DF11-0AB0 | |
| 连接电缆 | ||
| RS232C 接口 5m | 6ES7 902-1AB00-0AA0 | 9针D型孔接头 |
| RS232C 接口 10m | 6ES7 902-1AC00-0AA0 | |
| RS232C 接口 15m | 6ES7 902-1AD00-0AA0 | |
| 20mA-TTY 接口 5m | 6ES7 902-2AB00-0AA0 | 9针D型针接头 |
| 20mA-TTY 接口 10m | 6ES7 902-2AC00-0AA0 | |
| 20mA-TTY 接口 50m | 6ES7 902-2AG00-0AA0 | |
| RS422/485 接口 5m | 6ES7 902-3AB00-0AA0 | 15针D型针接头 |
| RS422/485 接口 10m | 6ES7 902-3AC00-0AA0 | |
| RS422/485 接口 50m | 6ES7 902-3AG00-0AA0 | |
| 加载驱动协议 | ||
| MODBUS 主站硬件狗Dongle | 6ES7 870-1AA01-0YA0 | 包括软件、手册光盘 |
| MODBUS 主站硬件狗Dongle | 6ES7 870-1AA01-0YA1 | 不包括软件、手册光盘 |
| MODBUS 从站硬件狗Dongle | 6ES7 870-1AB01-0YA0 | 包括软件、手册光盘 |
| MODBUS 从站硬件狗Dongle | 6ES7 870-1AB01-0YA1 | 不包括软件、手册光盘 |
表1 串口通讯模块以及相关产品的订货信息
说明:1、当您要实现MODBUS或Data Highway通讯时,需要在CP341/CP441-2模块上插入相应协议的硬件狗,这里我们所提到的硬件狗、Dongle、协议驱动或Loadable driver指的是同一个东西,如下图:
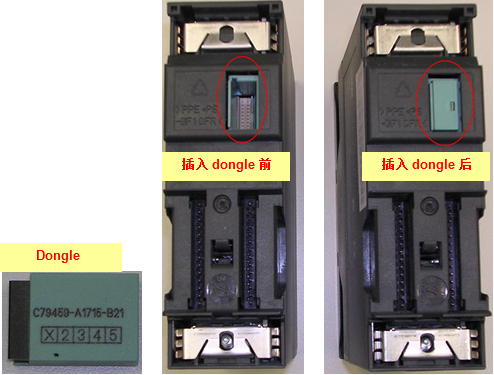
图1
2、MODBUS 是单主站结构的串行通信协议,系统中只能够有一个MODBUS主站,并且只能够实现主站和从站的数据交换,从站之间不能进行数据交换。
3、一般来讲,RS232C接口的通讯距离为15m,20mA-TTY接口的通讯距离为100m(主动模式)/ 1000m(被动模式),RS422/485接口的通讯距离位1200m。
4、Serial CPs模块可以同时与多台串行通讯设备进行通讯,如同时连接多个变频器、多个智能仪表等,如果您采用ASCII 通讯方式,需要人为地定义数据帧格式,可以在发送的数据包中包括站号、数据区、读写指令等信息,供Serial CPs 模块所连接的从站设备鉴别数据包是发给哪个站的,以及该数据包是对那个数据区进行的读或写。
5、串行通讯模板只有RS232C、20mA-TTY或RS485/422 三种电气接口类型,如果您想实现串口的光纤通讯,只能在电子市场上购买第三方制造的电气与光缆的转换设备,西门子不提供该类设备。
写通讯程序时,你需要该地址参数。
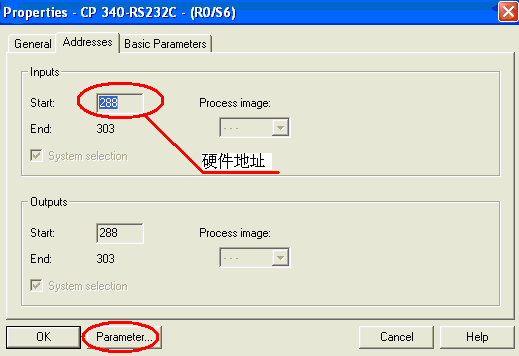
图 2
点击属性窗口上的 Parameters 按钮,选择你所要使用的通讯协议,这里我们选用 ASCII 协议,双击信封图标。
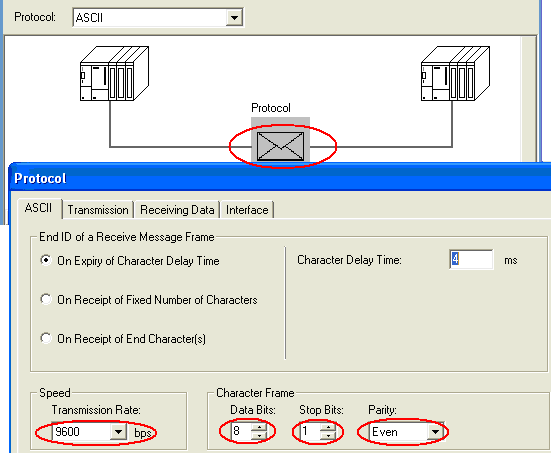
图 3
弹出 ASCII 协议通讯参数设置窗口,这里我们使用默认值:9600 bit/s,8 data bits,1 stop bit,even parity。对您的硬件组态存盘编译,硬件组态,如果此时SF灯亮,请将通讯电缆与另一个通讯伙伴进行连接后,SF灯熄灭,说明硬件组态正确。
2.2 编写通讯程序
在安装完 CP341的驱动程序,MODBUS 主站软件,MODBUS 从站软件等 3 个软件后,你可以在目录….\Siemens\STEP7\Examples 当中找到关于 CP341 的串口通讯和 MODBUS 通讯的例子程序,通过在 STEP7 软件的 SIMATIC Manager 下打开例子程序。

图 4
你可以使用 CP341 串口例子程序中 3964(R) 站 中的程序块实现 ASCII 通讯协议。打开 CPU 站下的 Blocks 文件夹,复制所有的程序块(除了 system data)到你的项目当中,只要作一些简单的参数修改,就可以实现相应的通讯了,如果你的 CP340/CP341 的硬件地址与例子程序当中的不同,那么你应当修改相应程序块 LADDR 参数,并与 CP340/CP341 模块实际的硬件组态地址值相同。修改后,程序块,将 CPU 切换至运行状态,CP340/CP341 开始循环发送数据,您可与看到 “TxD”灯闪烁。
调用 FB7/FB8 (CP341) 或 FB2/FB3 (CP340) 实现模块的字符收发功能:

图 5
下图显示了调用 FB7/FB8 实现通讯功能,在线监视的状态:

图 6
注意这里一定要将 M20.0 和 M30.0 使能位置为TRUE,同时在您的程序中插入接收数据区 DB1 和发送数据区 DB2 。
调试CP340/CP341 的一个基本方法是采用 PC 机上的串口通讯调试软件。Windows 系统自带的超级终端 ( Hyper Terminal ) 软件是一个非常方便的串口调试工具。用电缆将CP340/CP341 的通讯口和 PC 机的 Com 口(RS232C)连接起来,如果你采用的是 RS485/422 或 20mA-TYY 接口的模块,那还需在中间加一个 RS485??RS232 或20mA-TYY ??RS232 信号转换器,打开超级终端的路径如下图:

图 7
您打开超级终端软件后,定义连接的名称,确定通讯端口以及串口通讯的属性(波特率、数据位个数、校验类型、流控类型等),界面如下列图:
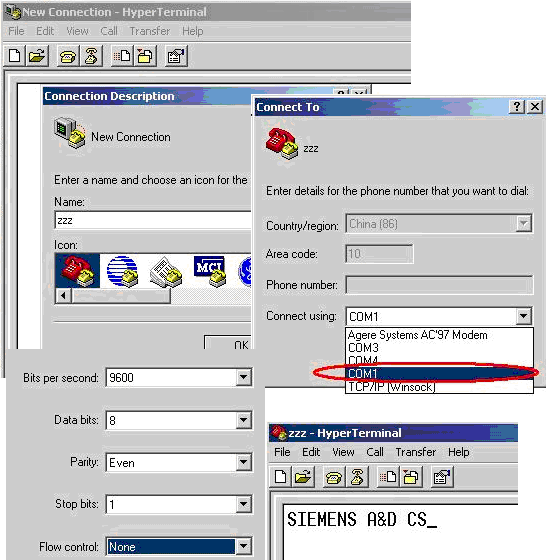
图 8
这里请您注意,如果您是用的是其他COM口,请根据实际连接的COM口进行选择,波特率、数据位,奇偶校验位,停止位,流控要与CP340/CP341组态时设定的值一致,起始位为1位,停止位可设定为1/2位,但必须是1,不能修改。
2.3 MODBUS 从站调试
首先需要在CP模块上插入MODBUS 从站Dongle,然后安装MODBUS 从站驱动软件包,您可以在上面的路径中获得,安装完软件包后,在您的项目中组态MODBUS从站,双击CP341模块,在模块的属性窗口中点击Parameter按钮,选择MODBUS从站协议:

图 9
将您的PC和PLC连接起来,PLC上电,点击Load Drivers图标,弹出装载驱动窗口。

图 10
点击Load Drivers按钮,完成从站驱动安装过程,进行MODBUS 驱动装载的时候,PLC必须处于STOP状态。在点击信封图标,打开MODBUS 从站参数窗口。









")

